事件监控是Kubernetes中的一种监控方式,可以弥补资源监控在实时性、准确性和场景上的不足。可使用NPD(node-problem-detector)结合SLS的Kubernetes事件中心进行监控。配置NPD集群检查项和异常事件离线功能,使用钉钉和EventBridge进行通知和处理。
工作原理
Kubernetes的架构设计基于状态机,不同的状态之间进行转换会生成相应的事件,正常的状态之间转换会生成Normal等级的事件,正常状态与异常状态之间的转换会生成Warning等级的事件。
ACK提供开箱即用的容器场景事件监控方案,通过ACK维护的NPD以及包含在NPD中的kube-eventer提供容器事件监控能力。

-
NPD(node-problem-detector)是Kubernetes节点诊断的工具,可以将节点的异常(例如Docker Engine Hang、Linux Kernel Hang、网络出网异常、文件描述符异常等)转换为节点的事件,结合kube-eventer可以实现节点事件告警的闭环。更多信息,请参见NPD。
-
kube-eventer是ACK维护的开源Kubernetes事件离线工具,可以将集群的事件推送至钉钉、SLS、EventBridge等系统,并提供不同等级的过滤条件,实现事件的实时采集、定向告警、异步归档。更多信息,请参见kube-eventer。
计费说明
ACK事件监控功能默认上报集群事件至SLS日志服务,SLS日志服务提供事件数据的存储、分析能力,默认90天内的ACK集群事件数据免费。详细信息,请参见创建并使用K8s事件中心。
场景一:使用NPD结合SLS的Kubernetes事件中心监控集群事件
NPD根据配置与第三方插件检测节点的问题或故障并生成相应的集群事件。而Kubernetes集群自身也会因为集群状态的切换产生各种事件,例如Pod驱逐、镜像拉取失败等异常情况。日志服务SLS(Log Service)的Kubernetes事件中心实时汇聚Kubernetes中的所有事件并提供存储、查询、分析、可视化、告警等能力。将集群事件接入日志服务的Kubernetes事件中心操作步骤如下:
步骤一:安装ack-node-problem-detector组件
步骤二:查看事件中心
-
登录容器服务管理控制台,在左侧导航栏选择集群列表。
-
在集群列表页面,单击目标集群名称,然后在左侧导航栏,选择。
-
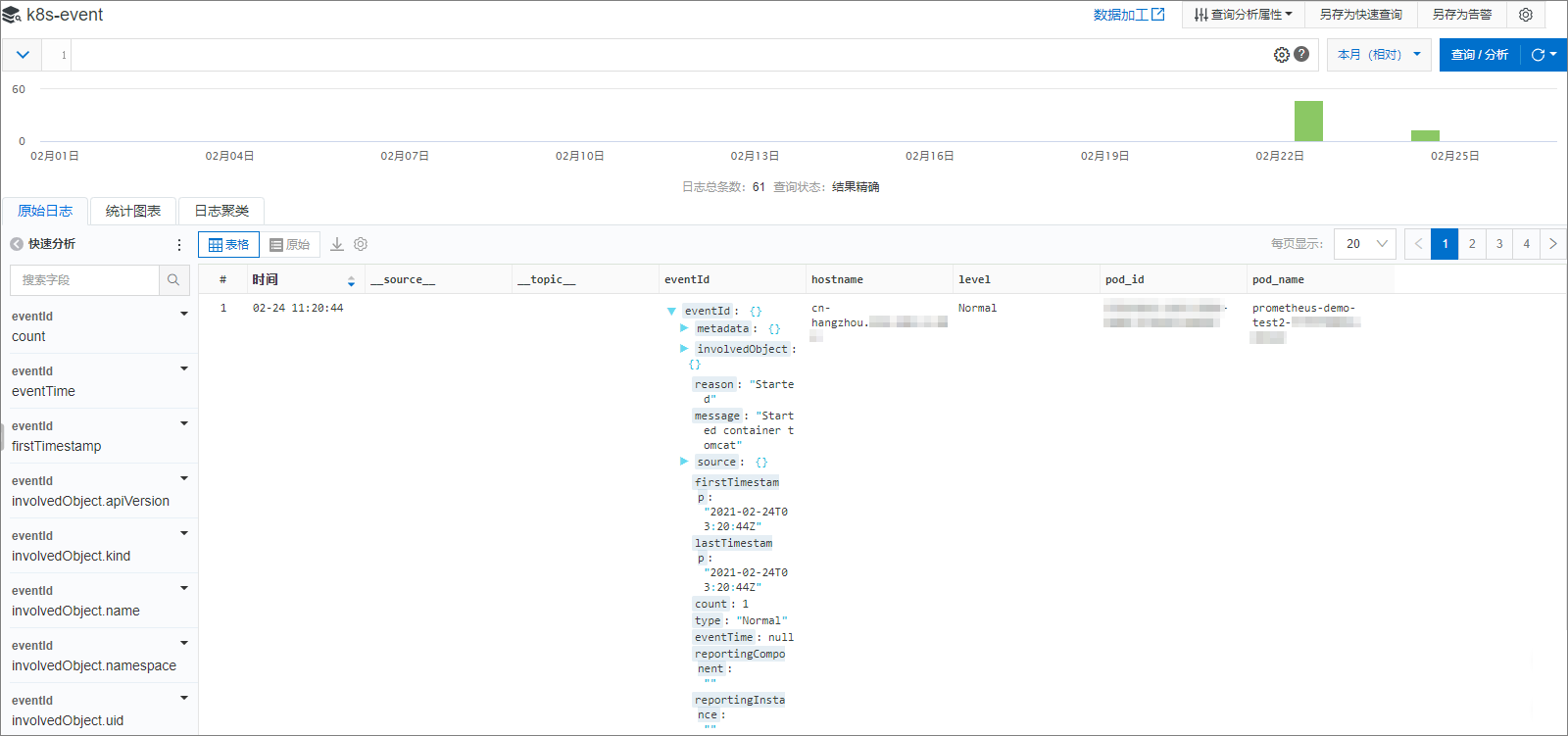
在事件中心页面,单击事件总览(事件中心)页签,查看Kubernetes事件中心相关信息。
可查看Kubernetes事件的总览及详情、Pod生命周期。更多信息,请参见采集Kubernetes事件。
场景二:配置NPD集群检查项以及异常事件离线功能
NPD结合kube-eventer可以实现节点事件告警的闭环。具体的操作流程如下:
操作流程
-
安装ack-node-problem-detector组件,安装过程请参见安装ack-node-problem-detector组件。
说明若之前已安装过ack-node-problem-detector组件,请删除重新安装,具体操作请参见常见问题。
-
在守护进程集页面,选择命名空间为kube-system,查看组件ack-node-problem-detector-daemonset是否运行正常。
-
当node-problem-detector与kube-eventer都正常运行后,可以通过配置的kube-eventer的离线通道进行数据的离线处理或者报警。
NPD支持的问题检查插件
从NPD 1.2.29版本开始,NPD中GPU异常检测插件将单独以DaemonSet方式部署,DaemonSet名称为ack-accel-health-monitor。更多信息,请参见GPU异常检测与自动隔离。
|
插件名 |
功能 |
说明 |
|
fd_check |
检查集群节点系统的已打开的文件描述符是否超过最大上限的80%。 |
80%为默认值,可通过参数修改。该检查项消耗资源较多,不建议开启。 |
|
ram_role_check |
检查集群节点是否具有RAM Role以及相应的鉴权密钥。 |
无 |
|
ntp_check |
检查集群节点上的NTP时间同步服务是否正常运行。 |
默认开启项。 |
|
network_problem_check |
检查集群节点上的 |
默认开启项。 |
|
inodes_usage_check |
检查集群节点系统盘的 |
80%为默认值,可通过参数修改。默认开启项。 |
|
csi_hang_check |
检查集群节点上的CSI存储插件状态是否正常。 |
无 |
|
ps_hang_check |
检查集群节点系统中是否有状态为D(挂起且无法唤醒)的进程。 |
无 |
|
public_network_check |
检查集群节点是否可以访问公网。 |
无 |
|
irqbalance_check |
检查集群节点系统中的irqbalance服务是否正常。 |
无 |
|
pid_pressure_check |
检查集群节点系统中的进程 |
默认开启项。 |
|
docker_offline_check |
检测集群节点上的Docker Daemon服务是否正常。 |
默认开启项。 |
场景三:使用钉钉机器人实现Kubernetes监控告警
使用钉钉机器人监控并告警Kubernetes的事件是一个非常典型的ChatOps实现。具体的操作步骤如下。
-
配置钉钉机器人
-
单击钉钉群右上角的
 图标,进入群设置页面。
图标,进入群设置页面。 -
单击机器人,然后单击添加机器人,选择需要添加的机器人。此处选择自定义机器人。

-
在机器人详情页面,单击添加,进入添加机器人页面。

根据以下信息配置群机器人后,阅读并同意服务及免责条款,然后单击完成。
参数
说明
编辑头像
(可选)为群机器人设置头像。
机器人名字
添加的机器人名称。
添加到群组
添加机器人的群组。
安全设置
安全设置支持3种方式:自定义关键词、加签和IP地址(段)。
目前集群的事件监控仅支持第一种方式,即自定义关键词。
选中自定义关键词,填入
Warning可接收所有监控报警。如果发现机器人消息发送过于频繁,可增加关键词进行过滤,最多支持设置10个关键词。ACK发送消息时也会同步此关键词。 -
单击复制,复制webhook地址以备后续使用。
 说明
说明在群机器人页面,选择目标群机器人,单击右侧
 图标可以进行以下操作:
图标可以进行以下操作:-
修改群机器人的头像及机器人名称。
-
开启或关闭消息推送。
-
重置webhook地址。
-
删除群机器人。
-
-
-
安装ack-node-problem-detector组件,安装过程请参见安装ack-node-problem-detector组件。
说明若之前已安装过ack-node-problem-detector组件,请删除重新安装,具体操作请参见常见问题。
-
更新ack-node-problem-detector组件的配置。
-
在集群列表页面,单击目标集群名称,然后在左侧导航栏,选择。
-
在Helm页面,找到ack-node-problem-detector组件,然后在组件对应的操作列单击更新,修改以下内容,然后单击确定。
-
将
npd下方的enabled设置为false。 -
将
eventer.sinks.dingtalk.enabled设置为true。 -
通过上面步骤webhook地址查看Token,填入Token字段。
-
-
预期结果:
部署成功后30秒,kube-eventer生效,当事件等级超过阈值等级时,即可在钉钉群收到如下告警。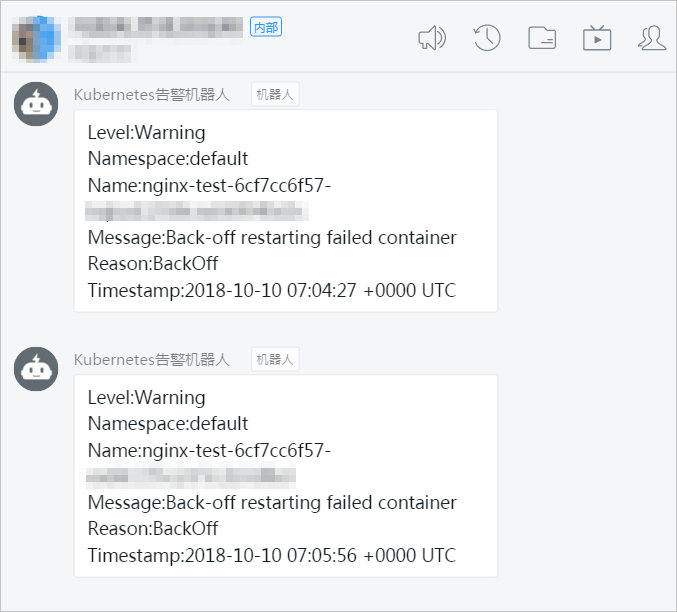
场景四:使用SLS离线Kubernetes事件
阿里云日志服务SLS(Log Service)可以将Kubernetes的事件以更持久的方式进行存储,从而提供更多的事件归档、审计的能力。详情请参见创建并使用K8s事件中心。
-
创建Project与Logstore。
-
登录日志服务管理控制台。
-
在Project列表区域,单击创建Project,填写Project的基本信息并单击创建完成。
本示例创建一个名为k8s-log4j的Project,与Kubernetes集群位于同一地域(华东1)。
说明为降低成本并提高效率,通常建议将日志服务与Kubernetes集群配置在同一地域。这样可以使日志数据通过内网进行传输,避免因地域不一致产生的外网数据传输费用,并减少传输延迟,实现日志的实时采集和快速查询。
-
创建完成后,k8s-log4j出现在Project列表下,单击该Project名称,进入Project详情页面。
-
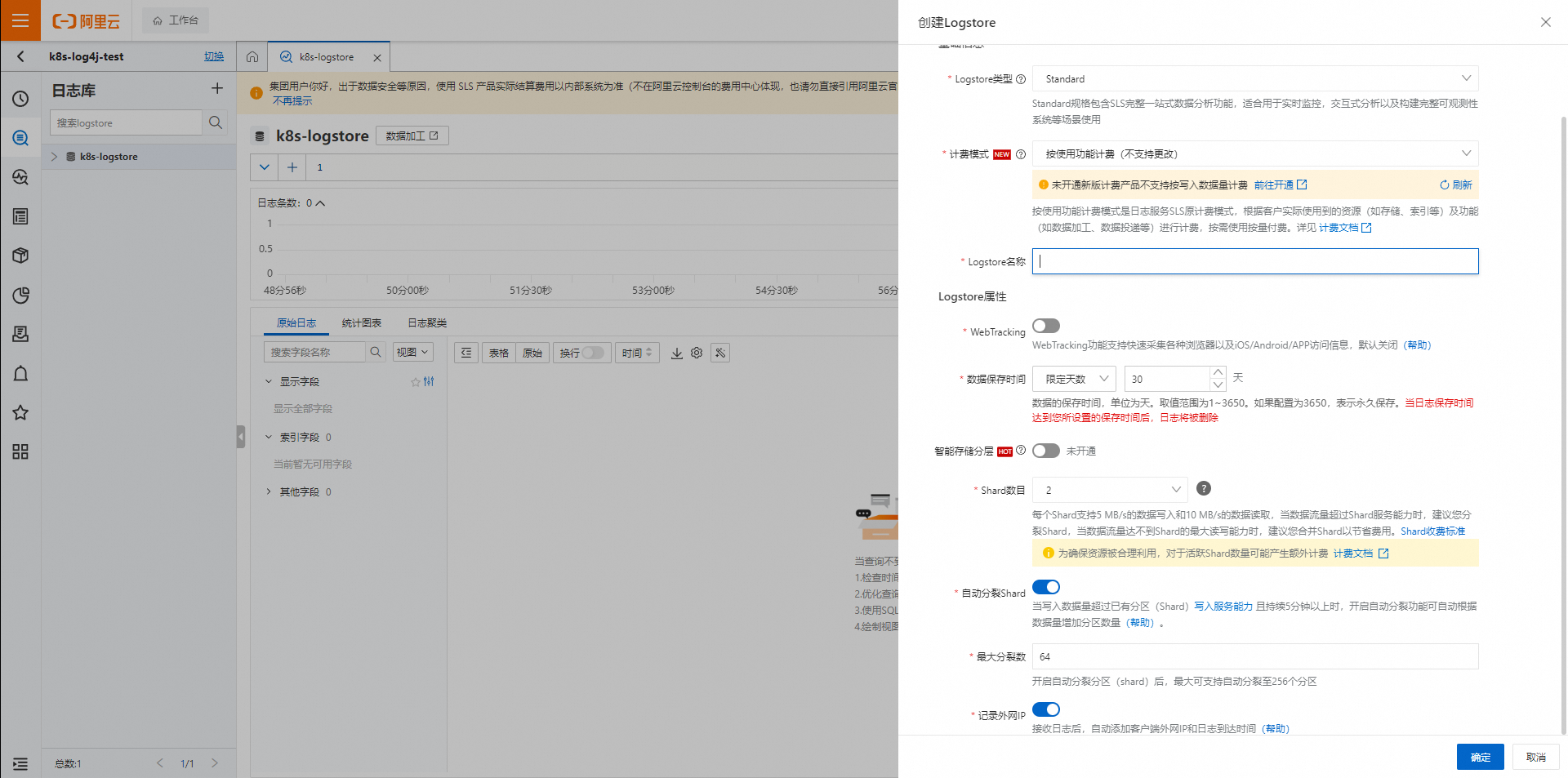
默认进入日志库页面,在页面左侧,单击加号+,弹出创建Logstore对话框。
-
填写日志库配置信息并单击确定。
本示例创建名为k8s-logstore的日志库。
-
创建完毕后,页面会提示使用数据接入向导。单击数据接入向导,弹出接入数据对话框。
-
选择Log4j 1/2,根据页面引导进行配置。
本示例使用了默认配置,可根据日志数据的具体使用场景,进行相应的配置。
-
-
在Kubernetes集群中配置log4j。
-
安装ack-node-problem-detector组件,安装过程请参见安装ack-node-problem-detector组件。
-
在集群列表页面,单击目标集群名称,然后在左侧导航栏,选择。
-
在Helm页面,找到ack-node-problem-detector组件,然后在组件对应的操作列单击更新,修改以下内容,然后单击确定。
-
将
npd下方的enabled设置为false。 -
将
eventer.sinks.sls.enabled设置为true。
-
-
-
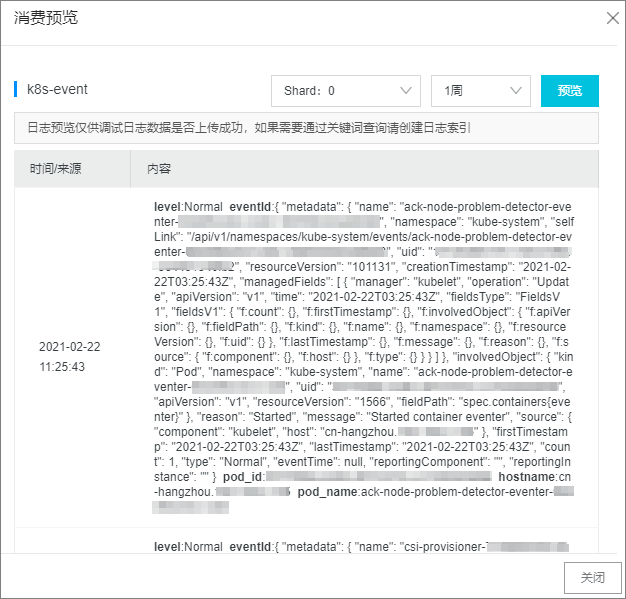
操作集群(例如,删除Pod或者创建应用等)产生事件后,登录日志服务控制台查看数据采集。请参见通过API消费。
-
设置索引与归档。请参见创建索引。
-
在日志服务控制台Project列表区域,单击Project名称。
-
单击日志库名称后的
 图标,选择查询分析。
图标,选择查询分析。 -
单击右上角的开启索引。
-
在查询分析对话框中配置索引,然后单击确定。
此时会出现日志查询与分析页面。
 说明
说明-
索引配置在1分钟之内生效。
-
开启或修改索引后,新的索引配置只对新写入的数据生效。
-
-
(可选)在需要设置离线归档与计算的场景下,在Logstore上将数据投递给MaxCompute或者OSS,请参见创建MaxCompute投递任务(新版)、创建OSS投递任务(新版)。
-
场景五:使用EventBridge离线Kubernetes事件
事件总线EventBridge是阿里云提供的一款无服务器事件总线服务,支持阿里云服务、自定义应用及SaaS应用以标准化、中心化的方式接入,容器服务事件可投递至EventBridge实现构建松耦合、分布式的事件驱动架构。关于EventBridge的详情,请参见什么是事件总线EventBridge。
-
开通事件总线EventBridge。具体操作,请参见开通事件总线EventBridge并授权。
-
安装ack-node-problem-detector组件,安装过程请参见安装ack-node-problem-detector组件。
说明若之前已安装过ack-node-problem-detector组件,请删除重新安装,具体操作请参见常见问题。
-
在集群列表页面,单击目标集群名称,然后在左侧导航栏,选择。
-
在Helm页面,定位ack-node-problem-detector组件,然后在组件对应的操作列单击更新,将
eventer.sinks.eventbridge.enabled修改为true,以配置事件中心并开启EventBridge事件离线数据链路,然后单击确定。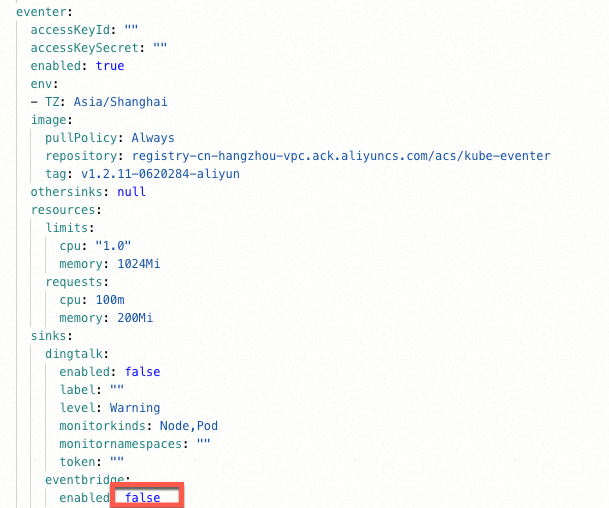
-
数据链路开启成功后,在事件总线EventBridge控制台查看容器事件。
-
在左侧导航栏,单击事件总线。
-
在事件总线页面,单击目标总线名称。
-
在左侧导航栏,单击事件追踪。
-
选择事件查询方式,设置查询条件,单击查询。
-
在事件列表操作列,单击事件详情,查看事件详细内容。
更多信息,请参见查询事件。
权限依赖及风险评估
阿里云容器服务ack-node-problem-detector组件以DaemonSet形式部署,会在每个节点上运行Pod。
需要在Pod中使用如下权限才能正常观测节点的异常状态,请在安装前评估安全风险:
|
权限名称 |
说明 |
必要性原因 |
|
hostNetworkSet |
容器使用宿主机网络命名空间 |
需检测节点本地网络是否正常。 |
|
hostPIDSet |
容器共享宿主机进程命名空间 |
需遍历宿主机所有进程,检测僵尸进程、资源占用异常或关键系统进程崩溃。 |
|
notReadOnlyRootFileSystem |
容器根文件系统非只读 |
需写入临时日志、缓存诊断数据或动态生成配置文件,以记录如NVIDIA XID异常的状态。 |
|
runAsPrivileged |
以特权模式运行 |
需访问挂载系统接口。 例如,在需要检测GPU等设备的场景下,需要挂载/dev目录。 |
|
runAsRootAllowed |
允许以 root 用户运行 |
需读取仅 root 可访问的系统文件(如 相关日志)。 |
|
seccompDisabled |
禁用 Seccomp 安全过滤 |
需执行一些运行时默认syscall白名单外系统调用,以监控节点系统健康状态。 |
|
sensitiveHostPathMount |
挂载敏感宿主机路径 |
需挂载关键目录(如: |
常见问题
如何重新安装ack-node-problem-detector组件?
-
登录容器服务管理控制台,在左侧导航栏选择集群列表。
-
在集群列表页面,单击目标集群名称,然后在左侧导航栏,选择。
-
在任务页面,单击kube-eventer-init-v1.7-xxxx右侧更多,单击删除。
-
在集群列表页面,单击目标集群名称,然后在左侧导航栏,选择。
-
在Helm页面,删除原有的ack-node-problem-detector组件。
-
在集群列表页面,单击目标集群名称,然后在左侧导航栏,单击组件管理。
-
在日志与监控页签,查找并重新安装ack-node-problem-detector。