ST_3DGridPath finds the least-cost path between two 3D points across a grid space.
Syntax
geomgrid[] ST_3DGridPath(geometry start, geometry end, box3d range, gridcost[] barriers, params text default '');Parameters
| Parameter | Type | Description |
|---|---|---|
start | geometry | The start point (3D point). |
end | geometry | The end point (3D point). |
range | box3d | The bounding box that defines the path planning area. |
barriers | gridcost[] | The traversal cost of all barrier grids. Call ST_CostUnion to combine multiple cost sets into a single gridcost[] value. |
params | text | A JSON string of algorithm options. Defaults to '' (applies all default values). |
params options
| Field | Values | Default | Description |
|---|---|---|---|
algorithm | dij, astar, nb_astar | astar | The pathfinding algorithm. dij uses Dijkstra's algorithm. astar uses A*. nb_astar uses bidirectional A*. |
movement | cross, octothorpe, strict_octothorpe | cross | The movement mode. cross moves only to adjacent grids. octothorpe moves to adjacent and diagonal grids. strict_octothorpe moves to diagonal grids only when adjacent grids are passable. |
distance | euclidean, manhattan, chebyshev | manhattan | The distance estimation method used by the heuristic. manhattan is efficient for grid-aligned movement. euclidean is more accurate for diagonal paths. chebyshev treats diagonal and straight movement as equal cost. |
Example `params` value:
{"algorithm":"astar","movement":"strict_octothorpe"}Omitted fields use their default values. Passing an empty string or omittingparamsentirely applies all defaults (astar,cross,manhattan).
Description
ST_3DGridPath computes a grid-based path using the specified algorithm and returns the traversed grids in path order.
The
startandendparameters accept 3D points. If the z-axis values are imprecise, the algorithm automatically snaps them to appropriate z-axis positions within the grid.The
rangeparameter defines the planning boundary. Configure it based on your digital surface model (DSM) data.The
barriersparameter encodes the traversal cost of obstacle grids. Call ST_CostUnion to combine multiple cost sets into a singlegridcost[]value.
Return value
An array of geomgrid values arranged in sequence from start to end.
Examples
Example 1: Default algorithm settings
This example uses all default settings (astar, cross, manhattan). With 4-directional movement only, the path traverses more grid cells to reach the destination.
select st_astext(ST_3DGridPath(st_geomfromewkt('srid=4490;POINT Z (1 1 1)'), st_geomfromewkt('srid=4490;POINT Z (5 6 3)'),
'BOX3D(0 0 0,10 10 10)'::box3d, st_costunion(array[st_setcost(array[st_gridfromtext('GZ0000000001')],1), st_setcost(array[st_gridfromtext('GZ0000000000')],5)])));Output:
{GZ0000000006,GZ0000000042,GZ0000000046,GZ0000000064,GZ0000000420,GZ0000000422,
GZ0000000426,GZ0000000604,GZ0000000640,GZ0000000644,GZ0000004200,GZ0000004240,
GZ0000004244,GZ0000004600,GZ0000004602,GZ0000004620,GZ0000004622,GZ0000006400,
GZ0000006420}Example 2: Diagonal movement with Euclidean distance
This example enables diagonal movement (strict_octothorpe) and Euclidean distance estimation. The path takes more direct diagonal steps, resulting in fewer total grid cells (11 instead of 19).
select ST_3DGridPath(st_geomfromewkt('srid=4490;POINT Z (1 1 1)'), st_geomfromewkt('srid=4490;POINT Z (5 6 3)'),
'BOX3D(0 0 0,10 10 10)'::box3d, st_costunion(array[st_setcost(array[st_gridfromtext('GZ0000000001')],1), st_setcost(array[st_gridfromtext('GZ0000000000')],5)]), '{"algorithm":"astar","movement":"strict_octothorpe","distance":"euclidean"}');Output:
{GZ0000000006,GZ0000000060,GZ0000000066,GZ0000000600,GZ0000000606,GZ0000000660,
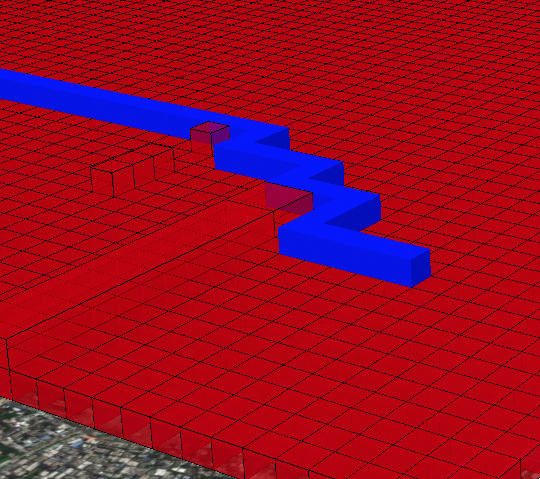
GZ0000000666,GZ0000006000,GZ0000006040,GZ0000006044,GZ0000006420}3D grid system