ST_3DGridPath
Calculates the shortest path between two 3D points within a specified bounding volume, returning the path as a sequence of geometry grids.
Syntax
geomgrid[] ST_3DGridPath(geometry start, geometry end, box3d range, gridcost[] barriers, params text default '');Parameters
| Parameter | Description |
|---|---|
start | The start point. Must be a 3D point (geometry). Inexact z-axis values are accepted — the algorithm automatically finds the nearest valid z-axis position. |
end | The end point. Must be a 3D point (geometry). Inexact z-axis values are accepted — the algorithm automatically finds the nearest valid z-axis position. |
range | The bounding volume for path planning, specified as a box3d. Configure this parameter based on your digital surface model (DSM) data. |
barriers | A gridcost[] array that combines the traversal costs of all grids containing barriers. To build this array, call ST_CostUnion. |
params | (Optional) A JSON string that configures the pathfinding algorithm. Defaults to ''. Unset fields fall back to their defaults. |
params fields
| Field | Description | Default |
|---|---|---|
algorithm | The pathfinding algorithm. Valid values: dij (Dijkstra's algorithm), astar (A* algorithm), nb_astar (bidirectional A* algorithm). | astar |
movement | The movement mode. Valid values: cross (horizontally and vertically adjacent grids only), octothorpe (adjacent and diagonal grids), strict_octothorpe (moves to diagonal grids when adjacent grids are passable). | cross |
distance | The distance estimation method. Valid values: euclidean (Euclidean distance), manhattan (Manhattan distance), chebyshev (Chebyshev distance). | manhattan |
Example `params` value:
{"algorithm":"astar","movement":"strict_octothorpe"}If params is left blank or a field is omitted, the system uses the default value for that field.Return value
Returns a geomgrid[] array of geometry grids arranged in path order from start to end.
Description
ST_3DGridPath finds the lowest-cost path through a 3D grid system between two points. The path is constrained to the bounding volume defined by range and respects grid traversal costs defined in barriers.
Key behaviors:
Approximate z-axis input: Both
startandendaccept 3D points with inexact z-axis values. The algorithm snaps each point to the nearest valid z-axis position within the grid.DSM-based range: The
rangeparameter defines the path planning volume. Set it based on your digital surface model (DSM) data.Cost-aware routing: The
barriersparameter aggregates traversal costs across all barrier grids. Call ST_CostUnion to compute this value.Default algorithm: When
paramsis omitted, the function uses the A* algorithm (astar), cross movement (cross), and Manhattan distance (manhattan).
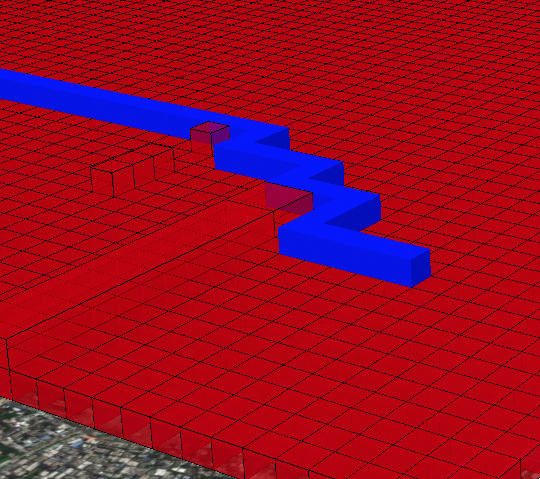
3D grid system
Examples
Example 1: Default algorithm settings
This example calculates a path using default algorithm settings (A*, cross movement, Manhattan distance).
SELECT st_astext(
ST_3DGridPath(
st_geomfromewkt('srid=4490;POINT Z (1 1 1)'),
st_geomfromewkt('srid=4490;POINT Z (5 6 3)'),
'BOX3D(0 0 0,10 10 10)'::box3d,
st_costunion(array[
st_setcost(array[st_gridfromtext('GZ0000000001')], 1),
st_setcost(array[st_gridfromtext('GZ0000000000')], 5)
])
)
);Result:
{GZ0000000006,GZ0000000042,GZ0000000046,GZ0000000064,GZ0000000420,GZ0000000422,
GZ0000000426,GZ0000000604,GZ0000000640,GZ0000000644,GZ0000004200,GZ0000004240,
GZ0000004244,GZ0000004600,GZ0000004602,GZ0000004620,GZ0000004622,GZ0000006400,
GZ0000006420}Example 2: Custom algorithm settings
This example uses A* with strict octothorpe movement and Euclidean distance estimation, which allows diagonal movement only through passable adjacent grids.
SELECT ST_3DGridPath(
st_geomfromewkt('srid=4490;POINT Z (1 1 1)'),
st_geomfromewkt('srid=4490;POINT Z (5 6 3)'),
'BOX3D(0 0 0,10 10 10)'::box3d,
st_costunion(array[
st_setcost(array[st_gridfromtext('GZ0000000001')], 1),
st_setcost(array[st_gridfromtext('GZ0000000000')], 5)
]),
'{"algorithm":"astar","movement":"strict_octothorpe","distance":"euclidean"}'
);Result:
{GZ0000000006,GZ0000000060,GZ0000000066,GZ0000000600,GZ0000000606,GZ0000000660,
GZ0000000666,GZ0000006000,GZ0000006040,GZ0000006044,GZ0000006420}