GanosBase is a spatio-temporal database engine built into PolarDB, providing integrated storage, querying, analysis, and rendering for multi-modal spatio-temporal data—vector, raster, trajectory, 3D models, point clouds, and network graphs—through a unified SQL interface.
How it works
GanosBase extends PolarDB for PostgreSQL (Compatible with Oracle) with ten specialized engines, each handling a distinct spatio-temporal data type. All engines share the same database instance, eliminating the need to move data between separate systems for different workloads.
Computing runs inside the database. Instead of pulling data out to middleware for processing, GanosBase pushes spatial computations down to the storage layer, reducing I/O and network overhead.
Engines
Geometry engine
Stores and queries vector data—points, lines, planes, and volumes. Supports SHP, GeoJSON, WKT, and WKB formats. Fully compatible with PostGIS functions, including 2D, 3D, and 4D coordinate spaces, planar and spherical computing, and 2D and n-dimensional spatial indexes. Supports transparent migration of existing PostGIS geometry applications. Delivers more than 5x the query and analysis performance for large-scale vector data, and more than 5x the query performance of standard PostGIS in common spatio-temporal query scenarios.

Raster engine
Stores and processes remote sensing images, Digital Elevation Models (DEMs), and gridded data. Accepts Tiff, HDF4, HDF5, GRIB, and NetCDF formats. A single row can hold objects larger than 1 TB, with Object Storage Service (OSS)-backed data lake scaling for larger datasets. Built-in operators cover raster pyramids, spatial relationship identification, statistics, raster attributes, image processing, algebra, color balancing, mosaic, DEM processing, and D8 catchment algorithms. Parallel operation mode delivers more than 10x performance improvement.
Moving object engine
Stores and queries trajectory data for people, vehicles, ships, and aircraft. Trajectories are stored natively in 4D (2D or 3D coordinates plus time), with custom attributes attachable to each trajectory point. Supports trajectory segmentation, stay-point detection, similarity comparison, spatio-temporal relationship identification, and efficient compression of tens of billions of trajectory points. Compared to traditional point-based models, the native trajectory model delivers 50–100x better performance in spatio-temporal analysis.
GeomGrid engine
Constructs spatial grids for 2D and 3D objects, encodes them using GeoSOT or H3 meshing rules, and supports real-time aggregation queries on grid codes. Integrates with Mapbox Vector Tiles (MVT) fast display for efficient rendering of aggregated attributes. Capable of encoding hundreds of millions of spatial objects based on grids.
Surface model engine
Stores and analyzes semantic 3D data expressed as surface meshes, including Building Information Modeling (BIM) data in IFC format. Deconstructs and structures models based on semantics, supports complex 3D spatial analysis and large-scale federated retrieval, and interfaces with mainstream front-end 3D rendering engines. Improves 3D data computing efficiency by more than 50x compared to traditional solutions.

Volume model engine
Stores and analyzes anisotropic data with non-homogeneous volume meshes, such as complex geological models. Supports grid truncation at sequence boundaries, business interpolation algorithms, complex 3D spatial analysis, and large-scale federated retrieval.
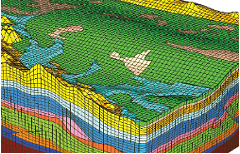
The volume model engine is in invitational preview. Contact us to request access.
Scene model engine
Stores and renders refined 3D scene models in OSGB, glTF/GLB, and OBJ formats. Supports space clipping and merging, texture clipping and simplification, model simplification, and visibility and shadow ratio analysis. Interfaces with mainstream front-end 3D rendering engines.
Point cloud engine
Stores and processes massive point cloud datasets collected by Light Detection and Ranging (LADAR) systems. Supports block spatial indexing, lossy compression, spatial queries and calculations, and point cloud thinning and simplification. Connects to mainstream front-end 3D rendering engines.

Path engine
Stores and queries topological graph data such as pipe networks and road networks, modeled as points and edges. Builds network topologies and supports TSP, K-shortest, turn-restriction, and bidirectional Dijkstra's pathfinding algorithms.

Quick display engine
Renders spatio-temporal data without pre-tiling. For vector and raster data, it builds fast display indexes using visibility culling algorithms and hierarchical aggregation, with support for local index updates. For 3D data, it constructs Level of Detail (LOD) rendering levels through model simplification, texture compression, and data stitching, then dynamically generates output that rendering engines can consume directly.

Atlas
Atlas is a lightweight spatio-temporal data analysis and visualization service jointly built by the GanosBase and DataV teams. It helps Internet customers quickly discover the value of spatio-temporal data, supporting business location decision-making, scientific research, and integration into user spatio-temporal applications. It pushes all spatio-temporal computations down to GanosBase and uses the quick display engine to render results directly from SQL queries.
Atlas supports:
Graphical preview of large-scale spatio-temporal datasets
Visualization and analysis of GanosBase data using SQL statements
Multiple expression types: points, lines, surfaces, raster, and grids
Business maps such as cloud maps, trajectory density maps, and grid aggregation maps
Operators
GanosBase supports abundant spatial analysis operators, including those for import and export, data type conversion, attribute processing, spatial relationship identification, spatial computing, spatial processing, and business analysis. You can independently build more complex business algorithms based on these operators.
Performance
Elastic parallel queries
GanosBase uses PolarDB's multi-node elastic parallel query (ePQ) feature to accelerate complex analytic queries across read-only nodes. Across 22 query types, ePQ achieves more than 10x acceleration for 19 query types and more than 60x acceleration for 3 query types. Performance scales linearly with additional resources.

HTAP for spatio-temporal data
GanosBase supports Hybrid Transactional and Analytical Processing (HTAP) by combining PolarDB for PostgreSQL (Compatible with Oracle) with AnalyticDB for PostgreSQL. Spatio-temporal data synchronizes and integrates across transactional and analytical nodes, enabling mixed workloads without data movement.

Storage
Polymorphic tiered storage
GanosBase supports both Elastic Block Storage and OSS within a single PolarDB instance. Store partitions of a partitioned table on OSS, or offload large spatio-temporal columns to OSS while keeping the rest of the table on block storage. Create, read, update, delete, and index operations work transparently across both storage layers through a multi-level cache.

Visualization capabilities
Quick display indexes
GanosBase builds sparse pyramid indexes using visibility culling algorithms, enabling visualization of hundreds of millions of polygon objects within seconds and parallel updates of hundreds of millions of display indexes within minutes.
MVT enhancement
GanosBase extends PostGIS MVT capabilities with global resampling and additional acceleration algorithms. Generate vector 2D or 3D tiles dynamically at faster speeds and in smaller file sizes compared to standard PostGIS MVT.
3D rendering without pre-tiling
For 3D data, GanosBase handles in-database model simplification, texture reorganization, data stitching, and LOD construction, then dynamically generates tile-connected output for front-end rendering engines—eliminating the traditional pre-tiling pipeline.
Contact us
Contact us if you have any questions.